Inception-V2 and V3¶
Inception-V2, Inception-V3는 3x3 Convolution만 사용하는 VGGNet에서 많은 힌트를 얻은 것으로 보인다. 그렇다면 Inception-V2와 Inception-V3가 이전 CNN 모델과 다르게 기여한 부분은 무엇일까?
Contribution¶
Inception-V2
Factorizing convolutions
5x5 1개 → 3x3 2개로 분해
3x3 1개 → 1x3 1개 + 3x1 1개로 분해
Reducing grids
Convolution과 Pooling의 Stride를 2로 변경
Inception-V3
Inception-V2와 구조는 동일한데 Hyperparameter만 변경
Optimizer: SGD → RMSProp
Label smoothing
Factorizing convolution: 7x7 Convolution 1개 → 3x3 Convolution 3개 (확실하지 않음)
BN-auxiliary
New architectures¶
Inception-V2에서는 기존 GoogLeNet (Inception-V1)에서 연산량을 더 줄이기 위해 기존 Filter를 나누어 (Factorizing) 사용했다. 또한, Pooling은 Feature map의 크기를 줄여주지만 작은 정보를 손실하는 문제가 있는데, 이를 조금 더 효율적으로 할 수 있는 방법에 대해 고민했다. 하나씩 살펴보자.
Factorizing convolution¶
큰 Filter를 인수분해하면 작은 Filter 여러 개로 구성된 Deep network를 만들 수 있다. 그 결과 Parameter 수가 줄면서 Network가 깊어지는 효과를 동시에 얻을 수 있다.
5x5 to two 3x3¶
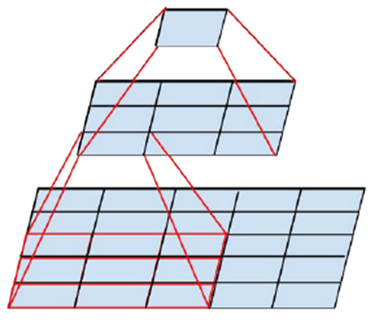
아래 그림은 5x5 Convolution을 2개의 3x3 Convolution으로 구현한 예시이다. 이를 통해 Parameter 수를 줄일 수 있는데, 실제로 25개에서 9+9=18개로 약 28% 줄어든다.
Factorizing inception¶
Inception 모듈도 위 방법을 이용하여 Parameter 수를 줄일 수 있다.
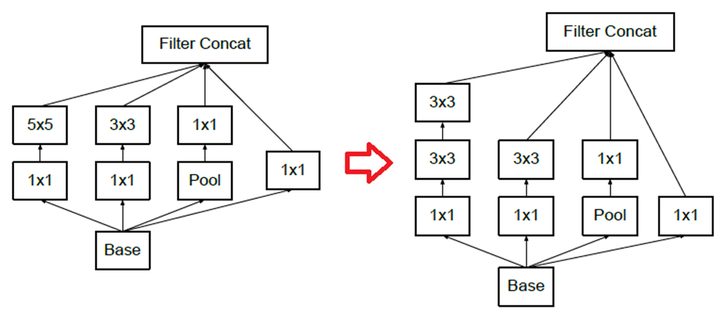
여기서도 5x5 Convolution은 2개의 3x3 Convolution으로 대체 가능하다. 또한, 7x7 Convolution은 3개의 3x3 Convolution으로 대체하여, Parameter 수를 49개에서 9+9+9=27로 약 45% 줄일 수 있다.
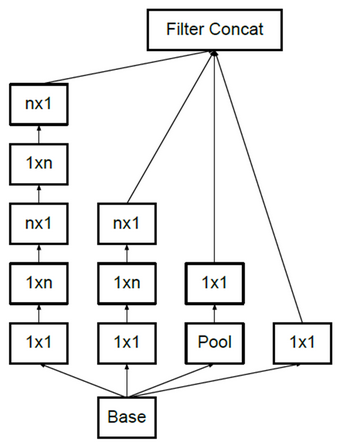
지금까지는 5x5 또는 7x7 Convolution을 Symmetry가 유지된 2개 또는 3개의 3x3 Convolution으로 인수분해 (Factorization) 했다. 하지만 반드시 그렇게 해야 되는 것은 아니다. 아래 그림처럼 3x3 Convolution을 1x3 그리고 3x1 Convolution으로 분해할 수 있다. 그 결과 Paramter 수를 9개에서 3+3=6개로 약 33% 줄일 수 있게 된다.
위 과정을 좀 더 일반화하면 nxn Convolution은 1xn과 nx1 Convolution으로 분해 할 수 있고, n이 커질수록 Parameter를 더 많이 줄일 수 있게 된다.
지금까지 분해한 방법을 모두 사용하여 Inception 모듈을 개선하면 다음과 같다.
정리해보면, 큰 Filter를 3x3 Convolution으로 나누어 (Factorizing) 표현하는 것이 VGGNet의 핵심 아이디어이고, 이는 Inception-V2와 V3의 기반 아이디어가 된다.
Reducing resolutions¶
기존에 해상도 (Resolution, Grid size)를 줄이는 방법은 Convolution 시 Stride를 1보다 큰 값으로 두거나 Pooling을 사용하는 것이었다. 그렇다면 다음 두 가지 방법 중 어떤 방법이 더 효과적인 방법일까? Inception을 Convolution으로 생각해도 상관없다.

왼쪽 방식은 Pooling으로 크기를 먼저 줄이고, Inception을 적용하여 Feature map을 얻는다. 연산량 관점에서는 효율적이지만 Pooling으로 인해 기존 Feature map에 숨어 있는 정보가 사라질 수 있기 때문에 최적이라고 하기는 어렵다.
반면, 오른쪽 방식은 Inception을 먼저 적용하여 Feature map을 생성한 후 Pooling으로 Feautre map의 크기를 줄이는 방법이다. 당연히 연산량은 약 4배 늘어나지만 줄이지 않은 상태에서 Feature를 추출했기 때문에 숨은 Feature를 더 잘 찾아낼 수 있게 된다.
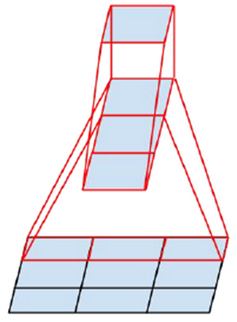
기존의 방법은 아직 연산량이 많은데 어떻게 하면 더 효과적으로 연산량을 줄일 수 있을까? Google이 제안한 구조는 다음 그림과 같다.
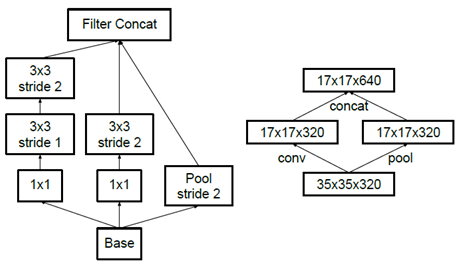
먼저, 우측 이미지처럼 Convolution과 Pooling의 Stride를 2로 변경 하여 Representation bottleneck이 없는 구조를 제시했다. 그리고 좌측 이미지처럼 5x5 Convolution을 3x3 Convolution 2개로 Factorization 하여 연산량을 줄인다. 결론적으로 구조 변경으로 효율성과 연산량 절감을 모두 얻을 수 있었다.
Inception-V2¶
지금까지 이야기한 방법들을 고려하여 Szegedy (GoogLeNet 설계자)는 “Rethinking the inception architecture for computer vision”에서 다음과 같은 구조의 Inception-V2를 제안했다.

출처: norman3.github.io, Google Inception Model
그리고 아래 표가 Factorizing convolution을 적용한 최종 Inception-V2 구조를 나타내고 있다.
Type |
Patch size / Stride |
Input size |
|---|---|---|
conv |
3x3 / 2 |
299x299x3 |
conv |
3x3 / 1 |
149x149x32 |
conv padded |
3x3 / 1 |
147x147x32 |
pool |
3x3 / 2 |
147x147x64 |
conv |
3x3 / 1 |
73x73x64 |
conv |
3x3 / 2 |
71x71x80 |
conv |
3x3 / 1 |
35x35x192 |
3xInception |
As in figure 5 |
35x35x288 |
5xInception |
As in figure 6 |
17x17x768 |
2xInception |
As in figure 7 |
8x8x1280 |
pool |
8x8 |
8x8x2048 |
linear |
logits |
1x1x2048 |
softmax |
classifier |
1x1x1000 |
Inception-V2에서는 기존 GoogLeNet에서 입력으로 사용한 224x224x3 이미지 보다 더 큰 299x299x3 이미지를 입력으로 사용했다. 또한, 위 표에서 알 수 있듯이 처음에 3x3 Filter를 사용한 Convolution layer가 3개 있다. 이는 원래 GoogLeNet에서 7x7 Filter 하나 쓴 것을 Factorization convolution을 적용한 결과이다.

출처: norman3.github.io, Google Inception Model
위 그림은 변경된 3가지 Inception의 형태이다. 첫 번째 Inception만 살펴보면 기존 Inception과 다르게 1x1/3x3/3x3 Convolution, 1x1/3x3 Convolution, Pooling 형태로 구현했고 마지막 Layer의 Stride는 2로 했다. 그리고 Inception 모듈 3개를 연속적으로 사용했다.
결과적으로 보면 기존의 GoogLeNet과 구조적으로 유사하지만 Network가 더 깊어지고 연산량이 줄어들었다.
Inception-V3¶
Inception-V3는 Inception-V2를 만들고 나서, 여러 가지를 수정해보다가 결과가 좋게 나온 것들을 합친 모델이다. 그래서 기존 Inception-V2와 구조는 동일하다. 변경된 사항은 아래에 요약했다.
Optimizer 변경
RMSProp으로 변경
Label Smoothing
Target 값을 one-hot encoding을 사용 X
값이 0 인 레이블에 대해서도 아주 작은 값 \(e\) 를 배분
정답은 \(1−(n−1) \times e\) 로 값을 반영하여 사용
Factorized 7-7
맨 앞쪽 Conv 7x7 → Conv 3x3 2개로 Factorization (확실하지 않음)
BN-auxiliary
마지막 Fully Conntected layer에 Batch Normalization (BN) 적용
정리가 다 되지 않은 부분은 추후에 정리할 예정이다.
Experiment results¶
다음은 Inception-V2를 다양하게 실험해 본 결과이다 (Single-crop). Regularizaiton 효과 극대화를 위해 Batch noramlized auxiliary classifier를 적용하면 Top-5 error가 5.6%까지 줄어드는 것을 확인할 수 있다.
Network |
Top-1 error |
Top-5 error |
Cost Bn Ops |
|---|---|---|---|
GoogLeNet |
29% |
9.2% |
1.5 |
BN-GoogLeNet |
26.8% |
― |
1.5 |
BN-Inception |
25.2% |
7.8% |
2.0 |
Inception-V2 |
23.4% |
― |
3.8 |
Inception V2 & RMSProp |
23.1% |
6.3% |
3.8 |
Inception V2 & Label smoothing |
22.8% |
6.1% |
3.8 |
Inception V2 & Factorized 7x7 |
21.6% |
5.8% |
4.8 |
Inception-V2 & BN-auxiliary |
21.2% |
5.6% |
4.8 |
추가로 Inception-V3에서는 Multi-crop을 144개 적용시켜 Top-1 error가 4.1%까지 낮아졌다.
Conclusion¶
Inception-V2에서는 기존 GoogLeNet의 구조 일부를 Factorization하여 연산량을 줄였고, 단순히 Pooling을 적용시키는 게 아니라 Convolution과 나란히 적용시키는 것이 효과적이라고 밝혔다. 또한, Inception-V3에서는 기존 구조에서 다양한 실험 후 조금 더 개선된 모델을 제시했다.
Reference