AlexNet¶
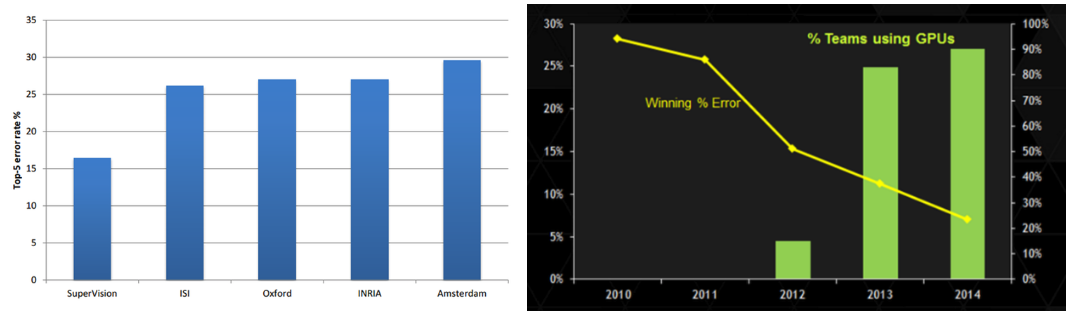
AlexNet은 Alex Krizhevsky, Ilya Sutskever, Geoffrey E. Hinton의 논문 “ImageNet classification with deep convolution neural network”에서 제안한 모델이다. 또한, AlexNet은 ImageNet ILVRC-2010의 120만 개 이미지를 1000개의 Class로 분류하는데 CNN을 사용했고 압도적인 성과를 얻었다. 아래 좌측 그림에서 SuperVision이 AlexNet이다.
출처: 라온피플 (Laon People) - 좌측, 우측
또한, AlexNet의 GPU 사용과 소스 코드 공개로 이후 많은 연구자들이 GPU를 사용하기 시작했다 (예: 알파고 → CPU 1,920개 / GPU 280개). 위 우측 그래프를 보면 알 수 있듯이 ILSVRC에 참여자의 GPU 사용률이 높아졌고, 그에 따라 Error rate가 낮아지는 것을 볼 수 있다.
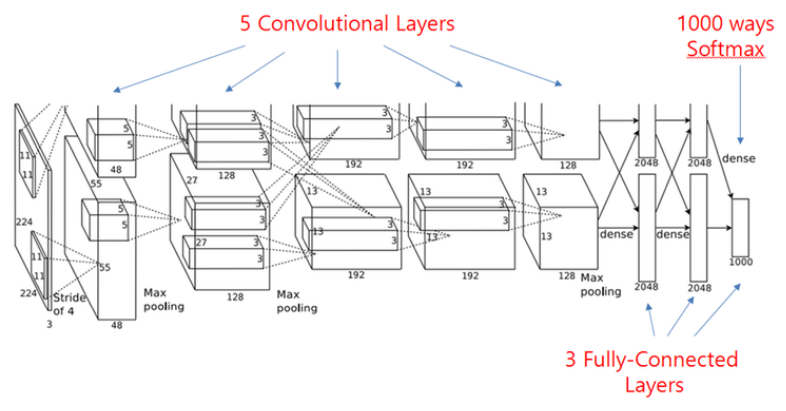
이러한 AlexNet은 5개의 Convolutional layer (일부 Max pooling), 3개의 Fully connected layer로 구성되어 있는데, LeNet-5와 유사하다. 특히, 성능 개선을 위해 크게 5가지를 고려했다.
ReLU + Local response normalization
Multiple GPU
Overlapping pooling
Dropout
위와 같은 방법을 적용하여 AlexNet은 ILSVRC 2012에서 Top-5 error rate 15.3%로 우승했다 (2위: 26.2%). 그럼 지금부터 AlexNet에 대해 자세히 알아보자.
Materials¶
AlexNet은 학습과 테스트를 위해 ILSVRC에서 제공하는 일부 ImageNet 데이터를 사용했다. 원래 ImageNet에는 22,000개 Category를 갖는 15 million개의 이미지가 있다. 하지만 이 중에서 하나의 Category에 약 1,000개의 이미지를 추출하여, Training에 1.2 million개, Validation에 50,000개, 테스트에 150,000개의 이미지를 사용했다.
이러한 ImageNet의 이미지를 바로 AlexNet을 학습하고 테스트 하는데 사용할 수 없다. 그 이유는 이미지 크기가 다양하고 그 개수가 부족해 여러 가지 문제가 생길 수 있기 때문이다. 지금부터 자세히 알아보자.
Resize & Crop¶
우선, ImageNet의 각 이미지 크기가 다르기 때문에 그 크기를 같게 만들어야 한다. 만약, 이미지의 크기가 모두 다르면 그에 따라 AlexNet의 Filter 크기 및 개수, Fully connected layer의 Neuron 개수 등 여러 가지 Hyperparamter를 바꿔줘야 하기 때문이다.
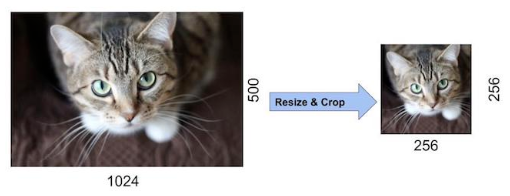
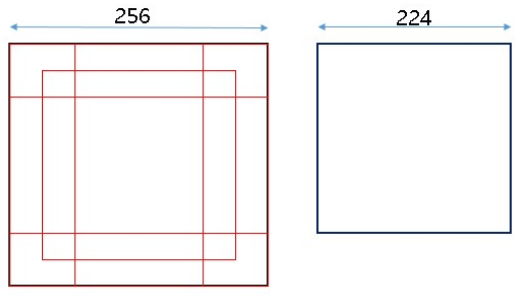
따라서 각 이미지를 Width와 Height 중 더 작은 값을 가지는 부분을 256에 맞게 Rescale 한다. 그리고 나서 이미지의 가운데를 기준으로 256x256 크기만큼만 잘라낸다 (Crop). 가운데를 기준으로 자르는 이유는 ImageNet 이미지는 가운데에 가장 중요한 Object를 표현하고 있을거라고 가정하기 때문이다. 그 결과 우리는 256x256 크기를 가지는 이미지 를 추출할 수 있고 이렇게 처리된 이미지들을 학습이나 테스트에 사용하게 된다.
추가로 이미지에 특정 픽셀의 R, G 또는 B 값이 너무 커서 나머지 픽셀의 R, G 또는 B 값의 영향력이 사라지는 것을 막기 위해, 이미지의 R, G, B의 평균을 각 픽셀의 값에 빼줌으로써 Normalization 한다.
Data augmentation¶
AlexNet은 학습할 Parameter 수가 약 60 million개이기 때문에 1.2 million개의 이미지로 학습하면 과적합 이 발생할 수 있다.
예를 들어 충주시 내 집 10채에 대한 집 정보 (하나의 집에 평수, 방 개수, … 집값 정보를 가지고 있음)로 집 값을 예측하면 잘못된 예측을 할 가능성이 높다. 그 이유는 아직 충주시의 집들에 대한 요인을 다 알기에 집 10채 정보는 부족하기 때문이다.
마찬가지로 AlexNet에서 학습해야 할 Parameter 수에 비해 데이터 수가 부족하기 때문에 과적합 문제가 생길 수 있는 것이다.
이를 해결하기 위해 AlexNet에서는 학습시킬 이미지 양을 늘리는 Data augmentation 과 일부 Neuron을 생략하는 Dropout 을 사용했다 (Dropout은 구조 부분에서 설명함). AlexNet에서는 데이터 양을 늘리기 위해 2가지 Data augmentation을 사용했고, 사용하기 전보다 Top-1 에러율을 1% 이상 줄였다고 한다.
방법 1: Crop¶
첫 번째 방법은 Crop을 통한 Data augmentation이다.
Training¶
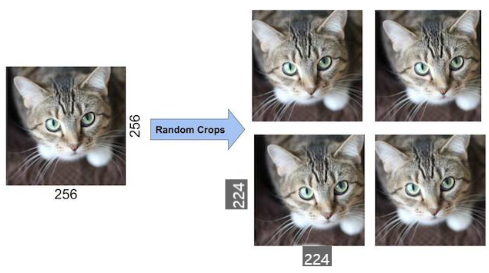
Training 시 256x256의 원본 이미지 중 224x224 크기의 이미지를 무작위로 추출 하고, 추출된 이미지를 좌우 반전 시켜 사용했다. 이 방법으로 1장의 이미지에서 32 x 32 x 2 = 1024 x 2 = 2048개 의 다른 이미지를 얻을 수 있게 된다.
Test¶
Test 시에는 중앙, 상하좌우 코너를 기준으로 224x224 이미지 5개와 이를 수평으로 반전한 5개 이미지, 총 10개 이미지 를 추출하여 사용했다. 이 작업은 간단한 작업이기 때문에 GPU로 학습되고 있을 때 병렬적으로 CPU로 실행할 수 있다.
Label-preserving transformation¶
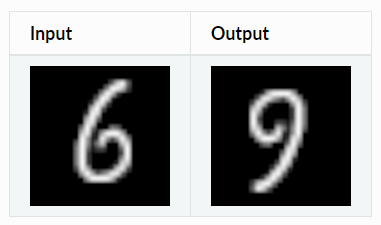
추가로 Data augmentation 할 때 주의해야 할 점이 하나 있는데, 변형한 이미지가 기존의 이미지의 Label을 그대로 가지고 있어야 된다는 점이다. 예를 들어 아래 그림처럼 상하를 반전시켜 데이터 수를 늘린다고 가정해보자.
출처: Augmentor.jl, Label-preserving Transformations
상하 반전된 이미지는 실제로 9이지만 Data augmentation을 자동화 한 경우 6으로 간주할 수 있고, 이는 잘못된 학습으로 이어질 수 있다. 그래서 기존의 Label을 유지하면서 이미지를 변형하여 그 수를 늘리는 것이 중요하다. 이를 Label-preserving transformation이라고 하고, AlexNet에서 이를 사용했다고 한다.
방법 2¶
또 다른 방법은 이미지 RGB 채널의 값을 변경시키는 방법이다. 그 방법은 원래 픽셀 값 + 이미지의 RGB 픽셀에 대한 주성분 분석 (PCA)한 값 X 랜덤 변수 (평균: 0, 표준편차: 0.1) 이고, 아래 내용이 실제 수식이다.
\(I_{xy} = [I_{xy}^R, I_{xy}^G, I_{xy}^B]^T + [p_1, p_2, p_3][\alpha_1 \lambda_1, \alpha_2 \lambda_2, \alpha_3 \lambda_3]^T,\ where\ \alpha_i \sim N(0, 0.1)\)
지금까지 Data 전처리 과정에 대해 언급했다. 지금부터는 어떤 구조를 가지는 AlexNet이 위 데이터를 이용하여 학습, 테스트를 진행했는지 보려고 한다.
Architecture¶
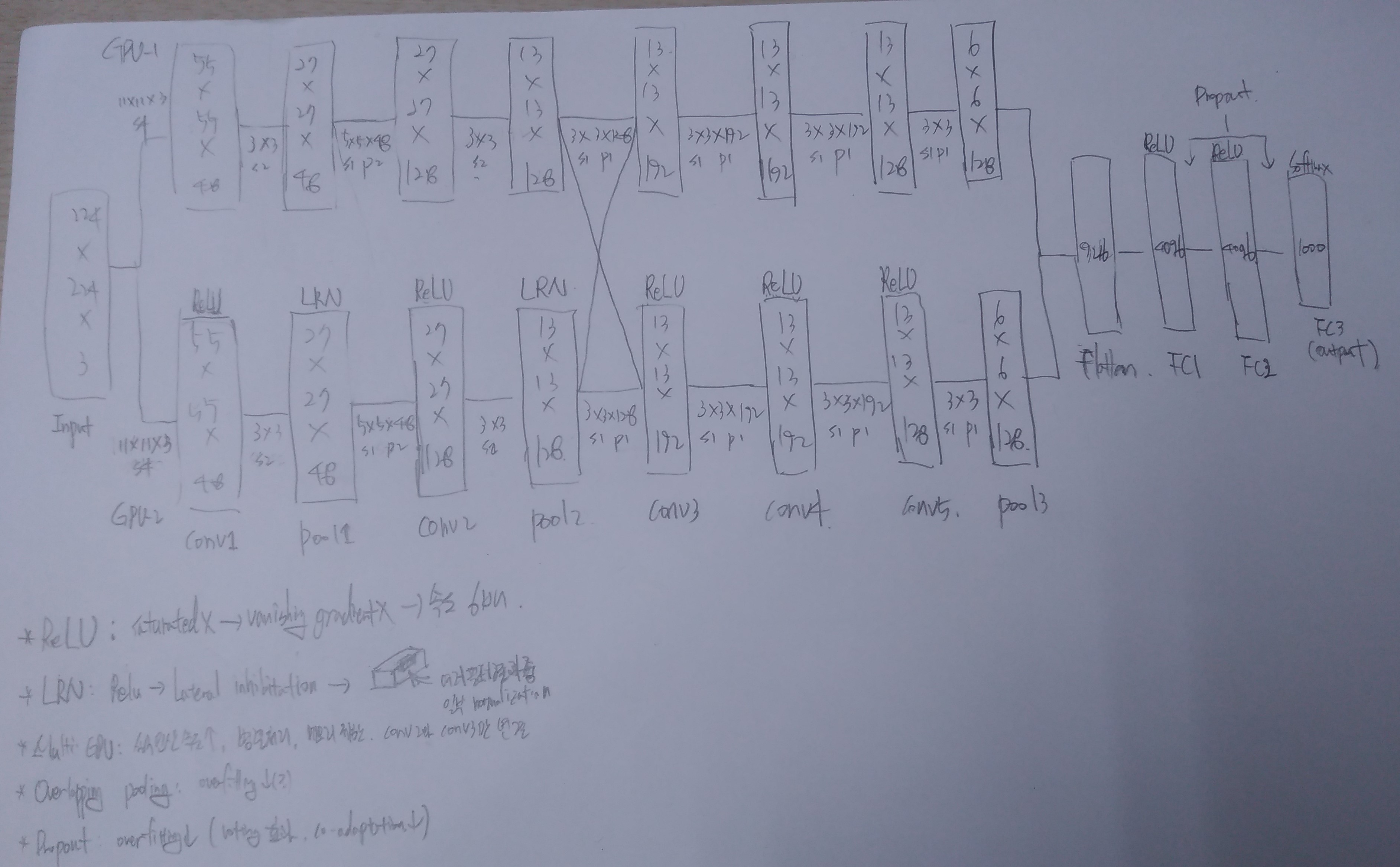
이전에 언급한 것처럼, AlexNet의 전체 구조는 5개의 Convolutional layer와 3개의 Fully connected layer로 구성되어 있고, 첫 번째/두 번째/다섯 번째 Convolutional layer 다음에 Max pooling을 사용한다. 또한, AlexNet은 방대한 Network (Neuron: 65만개, Parameters: 6천만개, Connection: 6억 3천만개)를 학습하기 위해 2개의 GPU (GTX580, 메모리 3GB)를 병렬로 사용했다.
우선, AlexNet에서 LeNet과 다르게 성능 개선을 위해 고려한 5가지에 대해 살펴보자.
ReLU + Local response normalization
Multiple GPU
Overlapping pooling
Dropout
ReLU¶
AlexNet은 LeNet에 비해 Network가 크기 때문에 활성화 함수 (Activation function)로 시그모이드 (sigmoid)나 하이퍼볼릭 탄젠트 (tanh)가 아닌 학습 속도가 빠른 ReLU 를 처음으로 선택했다. 기존 sigmoid나 tanh 함수는 포화되는 구간에서 Gradient 값이 작아져 학습 속도가 느려지며, 이를 Vanishing gradient 문제라고 한다.

하지만 ReLU는 미분해도 그 값이 항상 1 아니면 0이기 때문에 Gradient가 작아지지 않아 Vanishing gradient 문제를 해결할 수 있고, 논문에서는 ReLU는 포화되는 구간이 없어 tanh보다 학습 속도가 6배 정도 더 빠르다 고 한다. 그래서 대량의 이미지를 학습하는 경우에 1장의 이미지를 학습하는데 걸리는 시간이 조금만 커져도 전체 학습시간은 큰 차이를 보일 수 있다. 그래서 AlexNet에서는 ReLU 를 선택한 것으로 보인다.
Local response normalization¶
ReLU를 Saturated 부분이 없지만 그 값이 무한히 커질 가능성이 있어 너무 큰 값이 주변 값들을 무시할 수도 있다. 이러한 현상은 생물학적 뉴런에서 강한 자극이 주변 약한 자극이 전달되는 것을 막는 현상과 유사하고, 이를 Lateral inhibitation 이라고 한다. 그래서 AlexNet에서는 ReLU 결과 값을 Normalization 하여 일반화 된 모델을 만들기 위해 Local Response Normalization (LRN) 을 사용했다. LRN 수식은 다음과 같다.
\(b_{x,y}^i = a_{x,y}^i / \Bigg( k + \alpha \sum\limits_{j=max(0, i-n/2)}^{min(N-1, i+n/2)} (a_{x,y}^i)^2 \Bigg)^{\beta}\)
\(b_{x,y}^i\): LRN한 Activation 결과
\(a_{x,y}^i\): Activation 결과
\(i\): 현재 Filter
\(n\): 고려해야 하는 Filter 개수
\(N\): 총 Filter 개수
\(k,\ \alpha,\ \beta\): Hyperparameters
예를 들어 \(n=5,\ i=5\) 라고 해보자. 여기서 \(n\) 은 현재 \(i\) 번째 Filter 결과값을 기준으로 Normalization 할 Filter의 개수이다. 따라서 Filter 5를 기준으로 앞뒤로 2개씩 고려하면 Filter 3, 4, 5, 6, 7 값을 고려하여 Normalization 한 값을 Filter 5의 값으로 사용하게 된다. 이렇게 하면 원래 Filter 5의 결과값이 엄청 크다고 해도 주변 값들을 고려해서 그 값을 조금 더 줄여주는 효과가 생긴다. 그 결과 Lateral inhibitation 효과를 줄일 수 있게 된다.
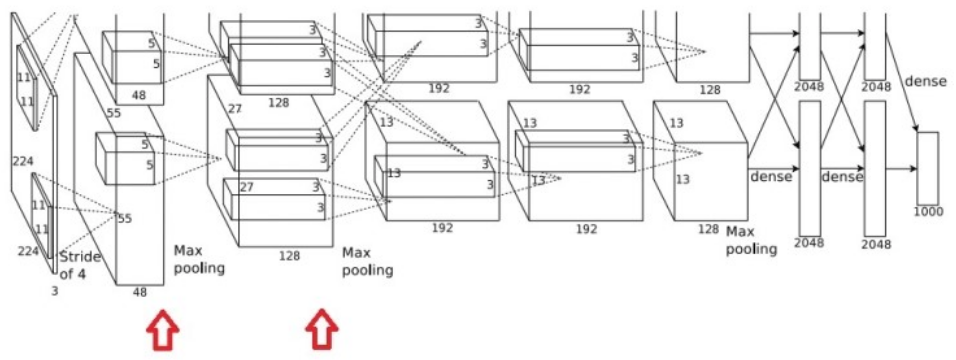
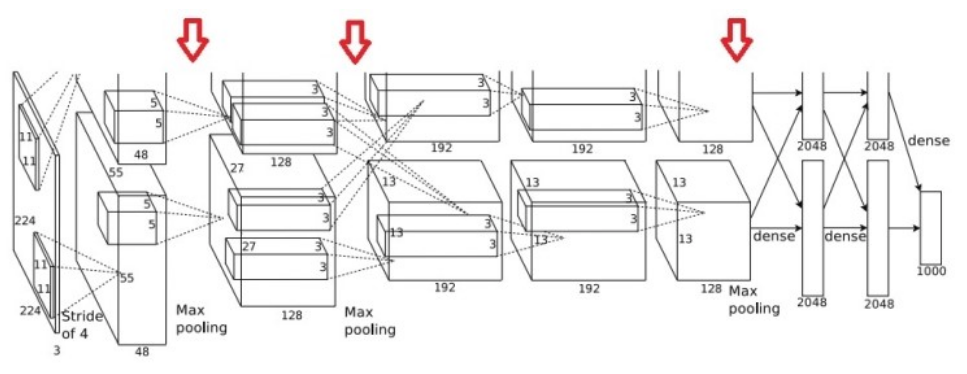
논문에서는 LRN의 각 Hyperparameter는 Validation을 통해 찾았고, LRN을 사용하여 Top-1과 Top-5 에러율을 각각 1.4%, 1.2% 개선했다고 하고 (참고: AelxNet 이후에는 Local response normalization 대신 Batch normalization을 사용한다고 함), LRN은 첫 번째, 두 번째 Convolutional layer에서 사용했고 그 위치는 아래 그림과 같다.
Multiple GPU¶
AlexNet의 구조는 위/아래로 구분되어 있는데 이는 2개의 GPU를 병렬적으로 사용하기 위함이다. 그렇다면 왜 AlexNet에서는 GPU 2개를 병렬적으로 사용한 것일까?
첫 번째 이유는 GPU 사용 시 학습 속도가 빨라지기 때문이다. GPU를 사용하면 CPU보다 실수 연산 속도가 더 빠르고, CNN의 Convolution 작업처럼 병렬적인 연산 이 가능한 경우에는 GPU가 더 적합하다. 더 자세한 이유는 “GPU를 사용한 이유” 에서 확인할 수 있다.
두 번째 이유는 AlexNet이 GPU (GTX580, 메모리 3GB) 하나로 학습하기에는 메모리 제한 이 있었기 때문이다. 그래서 AlexNet이 원주형의 독특한 구조를 띄고 있다. 하지만 이후에는 Computing power가 높아지면서 이러한 구조를 사용하지 않았다.
AlexNet은 두 개의 GPU가 병렬적인 형태의 구조를 가지면서 각 GPU에서 학습된 Filter가 다른 특징을 가지게 된다. 아래 그림은 첫 번째 Convolution layer에 대한 그림이다.
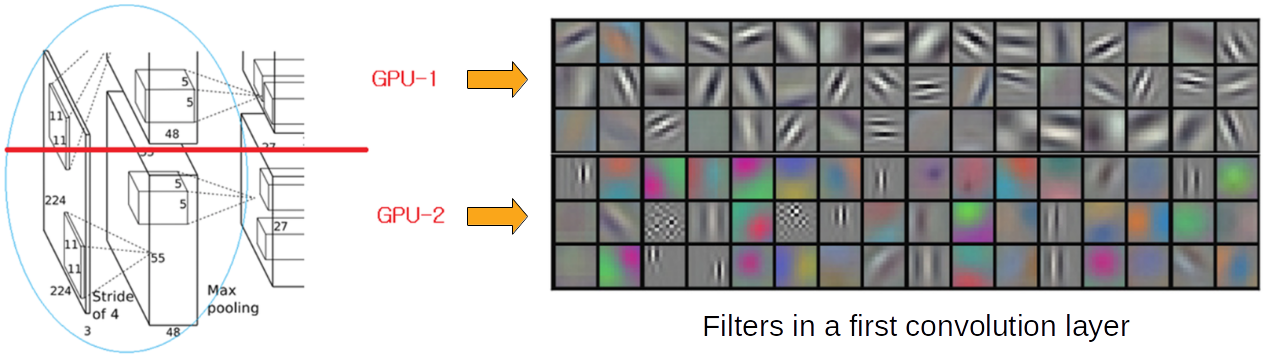
첫 번째 Convolution layer에서 GPU-1은 주로 컬러와 상관없는 48개의 Filter로 학습됐고, GPU-2에서는 주로 Color와 관련된 48개의 Filter를 학습되었다고 한다. 또한, 두 번째 Convolutional layer와 세 번째 Convolutional layer 사이에서는 GPU-1과 GPU-2의 Convolution 결과만 서로 연결시켰다. 저자는 Validation을 통해 서로 연결시킬 부분을 찾았다고 한다.
결론적으로 AlexNet은 GPU 2개를 병렬적으로 사용하여 Top-1과 Top-5 에러율을 각각 1.7%, 1.2% 줄일 수 있었다.
Overlapping pooling¶
CNN에서 Pooling은 주로 이미지 크기를 줄이기 위한 용도로 사용된다. LeNet에서는 Average pooling을 사용했지만 AlexNet에서는 Max pooling을 사용했고 이는 조금 더 생물학적인 특성과 유사하다. 그리고 아래의 빨간 화살표가 Max pooling 부분이다.
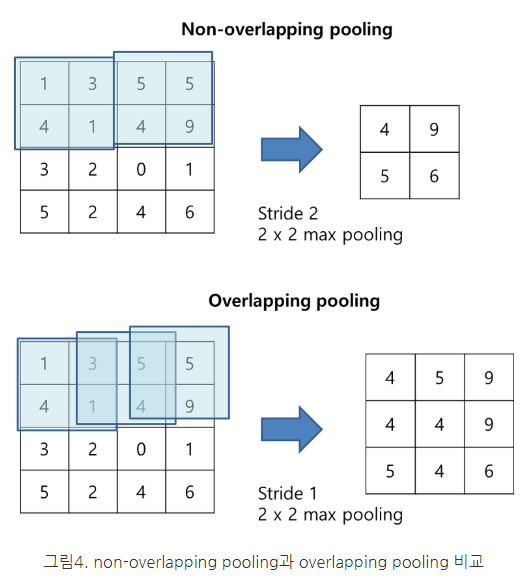
그리고 일반적으로는 겹치지 않게 Pooling을 실시하는데, AlexNet에서는 Overlapping pooling 방식을 사용했다. LeNet에서 2x2 Window (Stride 1)를 사용했지만 AlexNet에서는 3x3 Window (Stride 2)를 사용했고, 논문에서는 Top-1, Top-5 에러율을 각각 0.4%, 0.3%씩 감소시켰고 Overfitting 가능성을 더 줄일 수 있다고 주장하고 있다.
Dropout¶
Dropout 은 Voting 효과로 인한 Overfitting 문제를 개선할 수 있다. 또한, Co-adaptation (동조화)을 피해 특정 Neuron의 영향력을 낮춤으로써 그 외 다른 Neuron이 학습 되지 않거나 학습 속도가 느려지는 문제를 개선할 수 있다.
AlexNet에서는 처음 2개의 Fully connected layer에 Dropout (Rate = 50%)을 적용했다. 조금 더 자세한 내용은 2012년에 Hinton이 발표한 “Improving neural networks by preventing co-adaption of feature detectors”를 살펴보면 좋을 것 같다.
Detail architecture¶
이번에는 각 Layer에서의 구조적인 특징들에 대해 조금 더 자세히 살펴 볼 예정이다.
Input layer¶
AlexNet은 RGB 3가지 색상을 가지는 Image를 Input으로 사용하는 것이 LeNet과 다르다. 그래서 이미지의 Depth가 3이고 이를 Convolution 하기 위해 Filter의 Depth도 3이 된다.
1st conv layer¶
AlexNet의 Input image는 224x224x3으로 크기 때문에 각 GPU에 대해 11x11x3 Filter 48개 (Stride 4)로 Convolution 했고 (LeNet-5: 5x5 Filter), 이 때 Convolution 결과에 ReLU를 적용시켰다. 그 결과로 각 GPU에서 55x55 Feature map을 48개 (총 96개)를 생성했다. 여기에 3x3 Max pooling (Stride: 2)과 Local response normalization를 적용시켜, 각 GPU에 27x27 Feature map 48개 (총 96개)를 만든다.
2nd conv layer¶
마찬가지로 각 GPU의 27x27 Feature map 48개 (총 96개)에 각각 5x5x48 Filter 128개로 Convolution 했고, 여기에 ReLU를 적용시켰다. 그 결과로 각 GPU에서 27x27 Feature map 128개 (총 256개)를 생성했고, 여기에 3x3 Max pooling (Stride: 2)과 Local response normalization을 적용시켜 각 GPU에 13x13 Feature map 128개 (총 256개)를 만든다.
3rd conv layer¶
세 번째 Layer에서는 각 GPU의 13x13 Feature map을 128개 (총 256개)에 각각 3x3x128 Filter 192개로 Convolution 했고, 여기에 ReLU를 적용시켰다. 그 결과로 각 GPU에서 13x13 Feature map 192개 (총 384개)를 생성했다. 세 번째 Layer는 다른 Layer와 다르게 두 GPU에서 Convolution한 결과를 연결했다. 저자에 따르면 Validation을 통해 세 번째 Conv layer에서 두 GPU의 Convolution 결과를 연결하는 것으로 선택했다고 한다. 또한, 이번 Layer에서는 Max pooling과 Local response normalization을 하지 않는다.
4th conv layer¶
네 번째 Layer에서는 각 GPU의 13x13 Feature map 192개 (총 384개)에 3x3x192 Filter 192개로 Convolution 했고, 여기에 ReLU를 적용시켰다. 그 결과로 각 GPU의 13x13 Feature map 192개 (총 384개)를 생성했다.
5th conv layer¶
다섯 번째 Layer에서는 각 GPU의 13x13 Feature map 192개 (총 384개)에 3x3x192 Filter 128개로 Convolution 했고, 여기에 ReLU를 적용시켰다. 그 결과로 각 GPU에서 13x13 Feature map 128개 (총 256개)를 생성했고, 여기에 3x3 Max pooling (Stride: 1)을 적용시켜 각 GPU에 6x6 Feature map 128개 (총 256개)를 만든다.
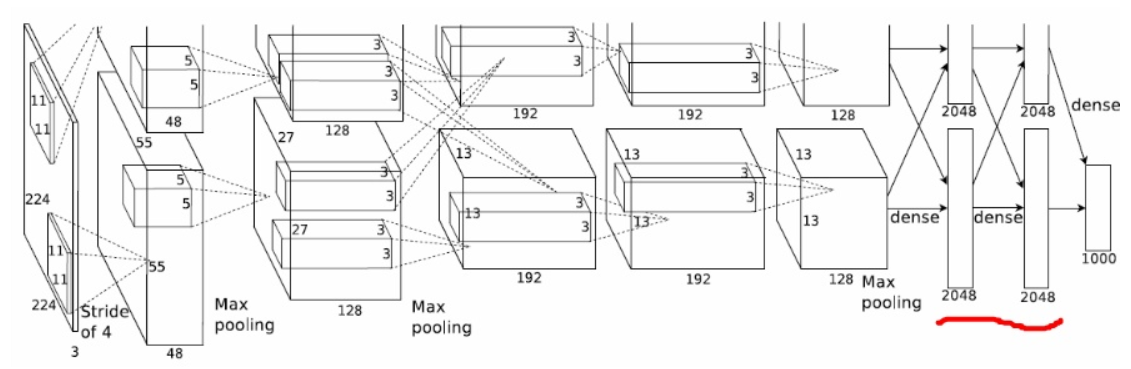
Fully connected layer¶
Fully connected layer (FC layer)와 연결하기 위해 각 GPU의 6x6 Feature map 128개 (총 256개)를 Faltten 시킨다. Flatten은 아래 그림처럼 좌측 상단 값부터 순차적으로 추출하여 일렬로 나열하면 된다.
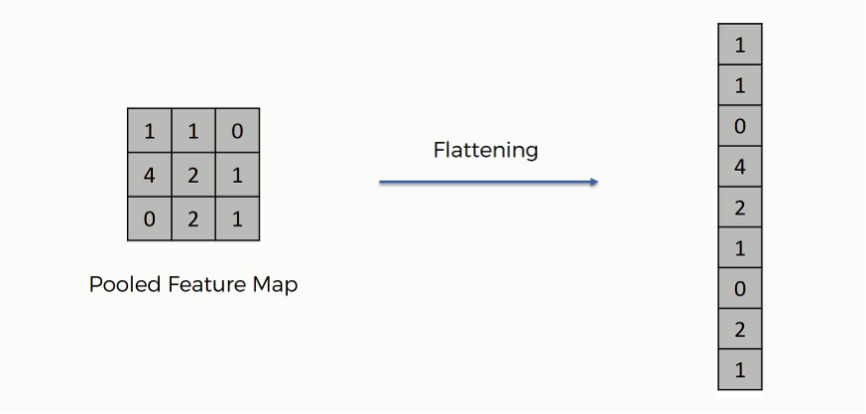
출처: SuperDataScience, Step3: Flattening
각 GPU의 6x6 Feature map 128개 (총 256개)를 모두 Faltten 하면 9216개의 Neuron을 가지는 Layer를 만들 수 있다. 이렇게 Flatten된 Layer는 4096개의 Neuron을 가지는 첫 번째 FC layer에 연결시킨다. 또한, 4096개의 Neuron을 가지는 첫 번째 FC layer와 마찬가지로 4096개의 Neuron을 가지는 두 번째 FC layer를 연결한다.
Output layer¶
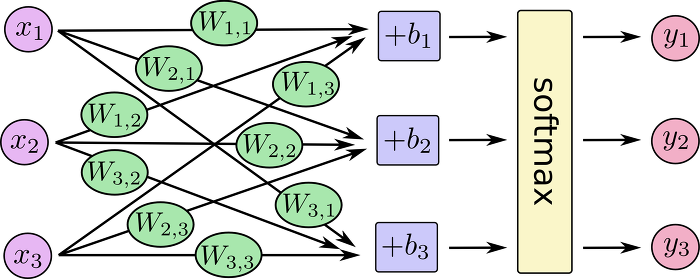
마지막으로 4096개의 Neuron을 가지는 두 번째 FC layer와 1000개의 Class를 구별할 수 있게 1000개의 Neuron을 가지는 Output layer와 연결한다. 여기서 1000개의 Neuron은 각 Category를 의미한다.
그리고 이 때 Softmax를 사용하여 Output layer로 전달되는 모든 값의 합이 1이 되게 값들을 변경해준다. 이는 각 1000개 Neuron (Category)이 나타나는 정도를 확률적으로 표현하여 해석하기 용이하게 만들기 위해서이다 (출처: 몽이몽이몽몽이의 블로그, Softmax).
지금까지 설명한 구조를 가지는 AlexNet에 이미지가 입력되어 마지막 Output layer까지 전달되었을 때, 가장 큰 값을 가지는 Neuron이 입력된 이미지의 Category가 된다. 지금까지 설명한 구조의 모든 Parameter를 정리하면 다음과 같다.
All parameters¶
Size |
Layer |
Detail |
|---|---|---|
[224x224x3] |
INPUT |
|
[55x55x96] |
CONV1 |
96 11x11 filters at stride 4, pad 0 |
[27x27x96] |
MAX POOL1 |
3x3 filters at stride 2 |
[27x27x96] |
NORM1 |
Normalization layer |
[27x27x256] |
CONV2 |
256 5x5 filters at stride 1, pad 2 |
[13x13x256] |
MAX POOL2 |
3x3 filters at stride 2 |
[13x13x256] |
NORM2 |
Normalization layer |
[13x13x384] |
CONV3 |
384 3x3 filters at stride 1, pad 1 |
[13x13x384] |
CONV4 |
384 3x3 filters at stride 1, pad 1 |
[13x13x256] |
CONV5 |
256 3x3 filters at stride 1, pad 1 |
[6x6x256] |
MAX POOL3 |
3x3 filters at stride 1, pad 1 |
[4096] |
FC6 |
4096 neurons |
[4096] |
FC7 |
4096 neurons |
[1000] |
FC8 |
1000 neurons (class scores) |
These are more details:
first use of ReLU
used Norm layers (not common anymore)
heavy data augmentation
dropout 0.5
batch size 128
SGD Momentum 0.9
Learning rate 1e-2, reduced by 10 mannualy when val accuracy palteaus
L2 weight decay 5e-4
7 CNN ensemble: 18.2% → 15.4%
Results¶
지금까지 AlexNet의 특징들에 대해 살펴봤는데, 실제로 이미지 분류를 잘 할 수 있는지 한 번 확인해보자. 다음은 실제 이미지를 분류한 결과이고, Mite (진드기)가 한 쪽에 치우처져 있는 것도 잘 구별하는 것을 알 수 있다. 추정이 틀린 경우에도 보기에 따라 추정이 가능한 답변을 반환했다고 볼 수 있다.
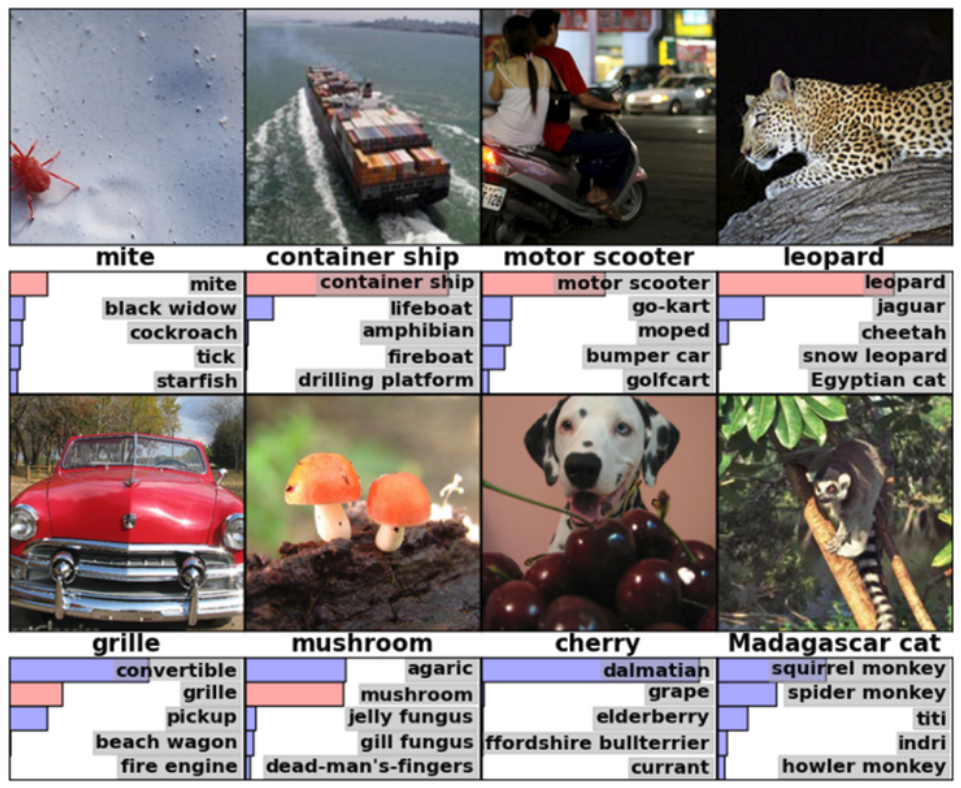
이런 결과가 SIFT (Scale Invariant Feature Transform)과 같은 Feature extractor를 사용하지 않고 나왔다는 것이 의미있는 부분이다. 실제로 당시 SIFT를 사용한 참가자의 모델은 성능이 더 낮게 나왔다.
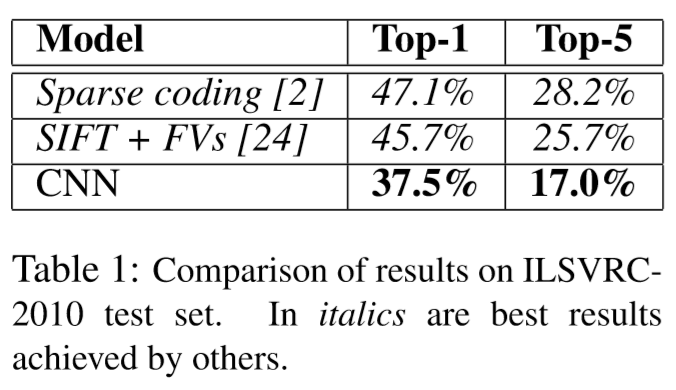
출처: ImageNet Classification with Deep ConvolutionalNeural Networks
결론적으로 데이터 양이 충분하고 좋은 CNN 구조를 가지면 좋은 결과를 낼 수 있다는 가능성을 보인 점에서 AlexNet의 의미는 크다고 할 수 있다.